![[vPython] Spider Robot Simulator: 4 steg](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] Spider Robot Simulator: 4 steg")
Innehållsförteckning:
- Författare John Day day@howwhatproduce.com.
- Public 2024-01-30 12:46.
- Senast ändrad 2025-01-23 15:11.


Om du tycker att min design är intressant kan du göra en liten donation:
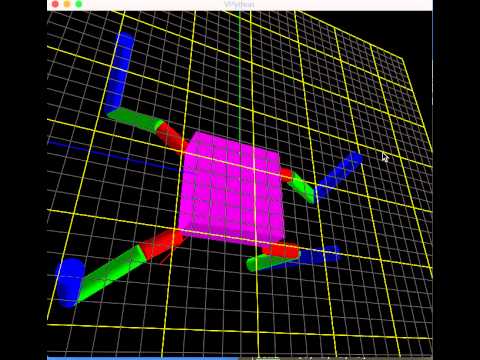
Jag använder vPython för att simulera åtgärderna för min Spider -robot. Det är lätt att utveckla dina egna intresseåtgärder i pc/mac och sedan överföra till arduino.
Det finns den riktiga roboten instruerbar om du är intresserad av den
www.instructables.com/id/DIY-Spider-RobotQu…
VPython är Python -programmeringsspråket plus en 3D -grafikmodul som kallas "visual", som skapades av David Scherer 2000. VPython gör det enkelt att skapa navigerbara 3D -skärmar och animationer, även för dem med begränsad programmeringserfarenhet. Eftersom den är baserad på Python har den också mycket att erbjuda för erfarna programmerare och forskare.
Steg 1: Installera VPython och Editor


installera python , Jag föreslår att du använder 2.7.x
www.python.org/
och sedan vpython
vpython.org/
och min favoritredaktör - PyCharm
www.jetbrains.com/pycharm/
Steg 2: Ladda ner koden och kör

Ladda ner koden och öppna den med PyCharm, kör koden så ser du en snygg 3D -spindelrobot på skärmen, och du kan använda musen med mittenknappen för att zooma in/ut, den högra knappen för att rotera.
Steg 3: Utveckla dina åtgärder i denna simulator
Det kommer att bli kul om du kan utveckla mer intressanta handlingar och dela med mig.
Steg 4: Fjärrkontroll till Real Spider Robot
Vad sägs om att styra den riktiga roboten med python tänkte bluetooth? Du kanske redan vill prova vägen. Jag lägger upp det senare om någon behöver det.
Rekommenderad:
DIY RACING GAME SIMULATOR -- F1 SIMULATOR: 5 steg

DIY RACING GAME SIMULATOR || F1 SIMULATOR: Hej alla Välkommen till Min kanal, Idag ska jag visa dig hur jag bygger en " Racing Game Simulator " med hjälp av Arduino UNO. det här är inte en byggblogg, det är bara översikt och test av simulatorn. Komplett byggblogg kommer snart
"Miles" Quadruped Spider Robot: 5 steg

"Miles" Quadruped Spider Robot: Baserat på Arduino Nano är Miles en spindelrobot som använder sina fyra ben för att gå och manövrera. Den använder 8 SG90 / MG90 Servomotorer som ställdon för benen, består av en anpassad kretskort som är gjord för att driva och styra servon och Arduino Nano.PCB har dedikerat
Quadruped Spider Robot - GC_MK1: 8 steg (med bilder)
")
Quadruped Spider Robot - GC_MK1: Spindelroboten a.k.a. GC_MK1 rör sig framåt och bakåt och kan också dansa beroende på koden som laddas på Arduino. Roboten använder 12 mikro servomotorer (SG90); 3 för varje ben. Styrenheten som används för att styra servomotorerna är en Arduino Nan
Hur man ansluter FlySky -sändare till valfri PC -simulator (ClearView RC Simulator) -- Utan kabel: 6 steg
 -- Utan kabel: 6 steg")
Hur man ansluter FlySky -sändare till valfri PC -simulator (ClearView RC Simulator) || Utan en kabel: Guide för att ansluta FlySky I6 med en dator för att simulera flygning för nybörjare av flygplan. Flygsimuleringsanslutning med Flysky I6 och Arduino kräver inte användning av simuleringskablar
[DIY] Spider Robot (Quad Robot, Quadruped): 14 steg (med bilder)
![[DIY] Spider Robot (Quad Robot, Quadruped): 14 steg (med bilder)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[DIY] Spider Robot (Quad Robot, Quadruped): 14 steg (med bilder)")
[DIY] Spider Robot (Quad Robot, Quadruped): Om du behöver extra stöd från mig är det bättre att ge en lämplig donation till mig: http: //paypal.me/RegisHsu2019-10-10 uppdatering: Den nya kompilatorn kommer att orsaka beräkningsproblemet för flytande tal. Jag har redan ändrat koden. 2017-03-26