: 8 steg (med bilder)")
Innehållsförteckning:
- Författare John Day day@howwhatproduce.com.
- Public 2024-01-30 12:46.
- Senast ändrad 2025-01-23 15:11.


Hej alla, Allt detta började med att göra en enkel XY -plotter efter att ha slutfört den framgångsrikt, jag tänkte utveckla ett enkelt tal till punktskriftskonverterare. Jag började söka på den online och oväntat var priserna för höga, vilket fick mig att bygga en liten bärbar och billig författare.
Eftersom vi vet att vad vi än tycker att bygga, kan det finnas eller åtminstone försöka av någon, så jag började leta efter en sådan skrivmaskin. Jag fick en video där den var ganska stor och bullrig, så jag tänkte sätta min egen smak som är liten bärbar och lätt att använda.
Ärligt talat är jag ny på Arduino och håller fortfarande på att lära mig det. Jag lyckades bygga en XY -plotter så att mina förhoppningar var höga med samma kunskap och jag kunde dra ut min egen lilla punktskriftsförfattare. Så i den här processen har jag lärt mig mycket och jag kunde äntligen utveckla det på bara 2 veckor.
Så här går det till hur man bygger en enkel punktskriftsförfattare.
Steg 1: Material för projektet
- Arduino Nano
- A4988 Steppdrivrutin
- Bluetooth seriell sändtagarmodul
- CD -driven stegmotor reglage linjär guide mikro
- Tvådelad 360-graders rotationsservomotor
- 1 st 180-graders servomotor
- 2 st injektionsspruta (i läkarbutiken)
- 1 bit klart akrylark
- Dubbelsidig skumtejp
- Fevi Kwik
- Man-kvinnlig bygelkabel
- Skärverktyg och skruvmejselsats.
- Gel / kulspetspenna
- Mobiltelefon med Bluetooth -funktion
- APP: Arduino Voice Control
Låt oss nu bygga det
-
Det totala projektet kan delas upp i 4 små delar
- Linjemodul Setup (med A4988 -drivrutin)
- Skapa upp och ner rörelse för författarens huvud
- Rulle för pappersrullning
- Bluetooth -integration
- I slutet måste du montera alla delar som kommer att leda till att projektet slutförs.
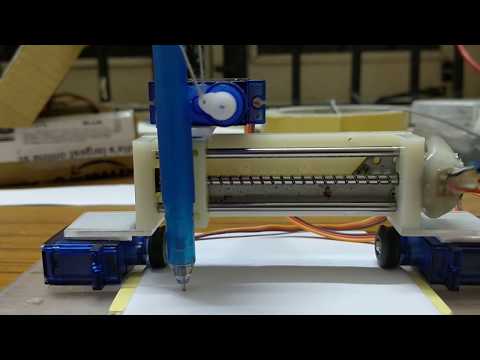
Steg 2: Del 1: Skapa Liner Motion för Writer

Vi måste fram och tillbaka rörelse för att skriva sakerna i tidningen. Det finns gott om videor där ute för att skapa sådan mekanisk rörelse med olika metoder. Men genom att använda stegmotor kan vi göra det mycket enkelt med hög noggrannhet.
Så för att undvika att skapa mekaniska saker använde jag stegmotor som kommer med en reglage, du kan bygga den själv, om du är intresserad av att bygga din egen kan du följa den här länken.
När den mekaniska delen är klar måste vi följa stegen för att göra den elektriska konfigurationen
- Följ bilden för att göra kretskonfigurationen.
- Se till att sätta
- Pin 6: Aktivera
- Pin 5: Steg
- Pin 4: Riktning
- Ladda upp koden för basicMove2 i din Arduino nano och öppna den seriella bildskärmen och använd "f" för vidarebefordran och "" b "bakåt och testa din krets. Kontrollera om du kan uppnå korrekt linjär rörelse eller inte med noggrannhet.
- Du kan också använda serier med fbfbffbbfffbbb -liknande kommando.
Steg 3: Del 2: Writer Head (upp och ner rörelse)
")
")
")
")
Det finns olika sätt att göra rörelser upp och ner. Du kan göra det med ett magnetventil. Men här använder jag en enkel penna för det med hjälp av en servomotor.
- Ta en enkel kulpenna med en avtagbar påfyllning.
- Skapa ett hål i toppen efter att ha tryckt påfyllningen inuti, se till att ditt hål ska gå igenom båda sidor av pennan och fyll på.
- Skapa ett annat hål i påfyllningen och fäst en snöre på den.
- Sätt tillbaka påfyllningen och skapa ett hål i pennan under refilehålet, se till att göra det minst 2-3 cm lägre än refilen.
- Bind nu ett elastiskt gummi ovanpå genom pennan och fyll på.
- Använd 180 graders servomotor och ställ in den till 0 grader och fäst strängen på nobben.
- När nobben roterar moturs 180, kommer påfyllningen att dras ut och när den kommer att flytta tillbaka till 0 grader på grund av det elastiska bandet på toppen kommer den att flytta tillbaka inuti.
- Fäst signalstiftet till pin nummer 8 i Arduino nano.
- Ladda upp koden för basicMove2 i din Arduino nano och öppna den seriella bildskärmen och använd "n" och testa din krets.
- Du kan också använda serier med nnnnnnnnn -kommando och kontrollera om det fungerar eller inte.
- Öka minska rotationsvinkeln för att få luströrelse.
Steg 4: Del 3: Pappersrulle



Nu pappersrullen är det den mest intressanta och utmanande delen.
- Ta bort injektionssprutans gummi.
- Skär plastutrustningen till en cirkel.
- Lägg det i gummit och applicera lite lim.
- Fäst den på servon och säkra den med lim.
- Skapa en till som ovan.
- Fäst signalstiftet till pin nummer 9 och 10 i Arduino nano.
- Ladda upp koden för basicMove2 i din Arduino nano och öppna seriell bildskärm och använd "p" och testa din krets.
- Du kan också använda serier av pppppppppp -kommando och kontrollera om det fungerar eller inte.
- Öka minska rotationsvinkeln för att få önskad hastighet.
- Försök att justera hastigheten genom att ändra potentiometern som finns i servon.
- Gör rotationen i samma riktning och hastighet (detta är det viktigaste och tråkigaste arbetet).
Steg 5: Del 4: Bluetooth -modulintegration

Denna del är den enklaste delen.
- Gör ovanstående kretskonfiguration och det är klart.
- Det hjälper dig att skicka röstkommando med Arduino Voice Control.
- Du kan söka efter "Arduino Bluetooth module hc-05" i google så får du coola exempel.
Steg 6: Del 5: Montera alla



Låt oss nu montera alla våra fyra delar.
- Rengör arket.
- Lägg till servomotor med dubbeltejp enligt bilden.
- Fäst extra plastbit på den linjära skjutreglaget och lägg den ovanpå två servon.
- Se till att placera den parallellt med pappersrullen.
- Fäst nu pennhuvudet, se till att det inte ska vidröra ytan och vid servorotation ska det slå ett hål på tejpen.
- Fäst stiftet Arduino nano.
- Ladda upp koden för basicMove2 i din Arduino nano.
-
Öppna seriell bildskärm och kontrollera alla kommandon
- f för vidarebefordran
- b för rygg
- p för pappersrullning
- n för att flytta pennan upp och ner.
- När all funktion har verifierats nu är den redo att skriva ut punktskrift.
Steg 7: Gör kretsen kompakt




Flöda bilden för att göra kretsen i en liten och enda brödbräda.
Steg 8: Låter skriva punktskrift

- Öppna Brallie.ino -filen, öppna den seriella bildskärmen för Arduino IDE.
- Lägg papperet under rullande pappersmotor.
- Skicka lite utrymme dvs ("") i kommandot och klicka på enter.
- Papper glider in.
- Gör det tills det korsar författarens huvud.
- Sedan kan du skicka ditt kommando i monitorn, den faktiska texten.
- Öppna din Bluetooth -app och anslut till Bluetooth och skicka röstkommando.
- vänd pappret för att se punktskriftsspråket.
- Jag försökte få ord som hej, hej och välkommen kan du se provutmatningspapper.
-
Du kan ändra nedanstående parametrar i koden för att få de specifika resultaten för dig.
- Mellanrum mellan punktskriftskolumner: int -steg = 30;
- Linjeavstånd mellan punktskrift två första prickarna till nästa två punkter rader: int paperLine = 250;
- Linjär reglers hastighet: int stepperDelay = 500;
- Författarhuvudets hastighet: int servodelay = 500;
- Antal tecken per rad: int n = 10;
Rekommenderad:
Lägg till Aux till Sonos med Raspberry Pi: 26 steg (med bilder)
")
Lägg till Aux till Sonos med Raspberry Pi: Jag har alltid varit fascinerad av Raspberry Pi men har aldrig haft ett riktigt behov av en förrän nu. Vi har tre Sonos -komponenter i vårt hus: En Play 5 i vardagsrummet, en Play 3 i sovrummet och en Sonos CONNECT: AMP som driver utomhushögtalare på våra
Text till punktskrift och ljud: 7 steg

Text till punktskrift och ljud: Detta projekt skapades av mig och min vän Akiva Brookler som ett skolprojekt för vår ingenjörsklass. Tanken bakom var att skapa ett sätt för blinda människor som bara kan läsa punktskrift för att kunna läsa text som skickas till sin dator. Nu för tiden
Bubble Talk: Förvandla ditt tal till bubblor !: 6 steg (med bilder)
")
Bubble Talk: Turn Your Speech into Bubbles !:”quod, ut dicitur, si est homo bulla, eo magis senex (för om, som man säger, människan är en bubbla, desto mer är en gammal man)” - Marcus Terentius Varro (116 BC - 27 BC), De Re Rustica En tvålbubbla är flyktig. Det varar bara ett kort ögonblick och
Arduino TTS (text till tal): 3 steg (med bilder)
: 3 steg (med bilder)")
Arduino TTS (Text to Speech): Hej killar idag i den här självstudien kommer jag att lära dig hur du får ditt Arduino -samtal att prata utan någon extern modul. Här kan vi använda detta i många projekt som taltermometer, robotar och många fler. Så utan mycket slöseri med tid, låt oss börja detta projekt
Billig punktskrift (La Picoreuse): 19 steg (med bilder)
: 19 steg (med bilder)")
Billig punktskrift (La Picoreuse): Presentation " La Picoreuse " är en billig (75 €), lätt att bygga A4 -punktskrift. Detta projekt syftar till att fungera som ett första steg eller en grund för reflektion för andra tillverkare för att ge ett alternativ till mycket dyra marknadspreglare