
Innehållsförteckning:
- Författare John Day day@howwhatproduce.com.
- Public 2024-01-30 12:44.
- Senast ändrad 2025-01-23 15:11.

För en tid sedan lade jag upp min Wifi PPM -kontroller. Det fungerar ganska bra. Bara räckvidden är lite kort. Jag hittade en lösning för detta problem. ESP8266 stöder ett läge som kallas ESPNOW. Detta läge är mycket mer låg nivå. Det tappar inte anslutningen så lätt och om den tappar anslutningen kopplas den om igen direkt.
Jag använder tre ESP8266. Den ena är ESPNOW -mottagaren, den andra är ESPNOW -avsändaren och den tredje är den åtkomstpunkt som du kan ansluta till. Den tredje behövs eftersom ESPNOW -avsändaren inte kan vara en åtkomstpunkt samtidigt. Jag har också lagt till några antenner för att få bättre räckvidd.
Det finns en andra åtkomstpunkt direkt vid mottagaren. Om du ansluter till detta har du samma som med det gamla WifiPPM -projektet.
Jag har också lagt till stöd för MSP -protokollmottagare. Detta är "MultiWii Serial Protocol" som stöds av MultiWii, Betaflight, Cleanflight och många andra flygkontroller.
Steg 1: Dellista




Du behöver tre ESP8266 -moduler av något slag. Men du vill ha det bästa utbudet. Så jag föreslår att du använder ESP8266 -moduler med antenner. Det fungerar också utan antenner. Jag använder följande delar:
2 x ESP07 (ESP8266 -modul med antennkontakt)
1 x ESP12
1 x 3dBi Mini Antenne I-PEX U. FL IPX på mottagarsidan
1 x ESP8266 2, 4 /5 GHz 3dbi Wlan Wifi Antenne SMA Stecker / hane + I-PEX Adapter på avsändarsidan
3, 3 V strömförsörjning för alla ESP8266 -moduler
Du behöver också en dator med Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 stöd för Arduino IDE. Följ dessa instruktioner: https://learn.sparkfun.com/tutorials/esp8266-thin…Websocket-bibliotek för Arduino:
Steg 2: Ladda ner och flasha skisserna



Du kan ladda ner skisserna här.
Packa upp filen. Det finns tre mappar: Master-AP, Sender, Receiver
Master-AP: Det är skissen för åtkomstpunkten. Öppna skissen med arduino IDE. Ställ in CPU -frekvensen på 160 MHz i verktygsmenyn och ladda upp skissen till ESP12.
Avsändare: Det är skissen för MSPNOW -avsändaren. Ställ in CPU -frekvensen till 160 MHz och ladda upp den till en av ESP07.
Du kan se på den första bilden hur du ansluter ESP8266 -modulen för blinkning.
Anslut nu ESP12 (åtkomstpunkt) och avsändarens ESP07 seriella portar och strömanslutningar (andra bilden): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Starta båda modulerna och anslut till åtkomstpunkten "Long-Range-WifiPPM/MSP". Lösenordet är "WifiPPM/MSP"
Öppna en webbläsare och öppna IP -adressen 192.168.4.1. Kontrollwebbplatsen visas. Klicka på knappen "Wifi Info". En meddelanderuta med avsändarens MAC och mottagarens MAC visas.
Öppna mottagarskissen i Arduino IDE. Ändra raden "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (tredje bilden) till avsändarens Mac -adress som visas på webbplatsen. Mottagaren Mac borde vara ok. Se till att CPU -frekvensen är inställd på 160 MHz och ladda upp skissen till den andra ESP05.
Steg 3: Anslut mottagaren till flygkontrollen och konfigurera Cleanflight



Anslut nu mottagaren till flygkontrollen. Din flygkontroll ska ha en 3,3 volt utgång med minst 200 mA. Om inte behöver du en extra 3, 3V spänningsregulator.
Anslut ESD: ns GND till flygkontrollens GND. Anslut ESP: s VCC till 3, 3V på flygkontrollen eller till den extra 3, 3V spänningsregulatorn.
Du kan använda PPM -utdata eller seriell MSP -utgång.
För MSP -utgång ansluter du TX för ESP8266 till RX i en seriell port på din flygkontroll. (Bild 1)
För PPM -utgång, anslut GPIO5 på ESP8266 till PPM -ingången på flygkontrollen. (Bild 1)
Efter anslutning av ESP startar flygkontrollen och öppnar cleanflight. Anslut din mobiltelefon till åtkomstpunkten "WifiPPM/MSP". Lösenordet är "WifiPPM/MSP"
För MSP: Öppna fliken portar och ställ in MSP på den seriella porten du anslöt ESP8266 (bild 2). Spara och starta om. Gå till konfigurationsfliken och ställ in mottagaren på "MSP seriell mottagare" (bild 3). Spara och starta om.
För PPM: Läs i din flygkontrollers handbok hur du ställer in PPMGå till konfigurationsfliken och ställ in mottagaren på "PPM -mottagare" (bild 4). Spara och starta om.
Nästa inställning är samma för båda mottagarna: Gå till mottagarfliken. Ställ in kanalerna på "RTAE1234" (bild 5/video). Spara installationen.
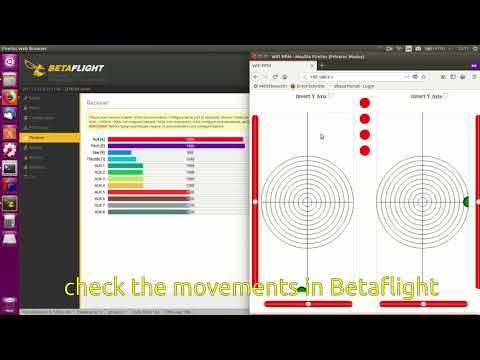
Öppna nu en webbläsare på din smartphone. Öppna sajten 192.168.4.1 (bild 6). Nu kan du kontrollera styrenheten.
Om det fungerar, starta två avsändare ESP8266. Anslut till åtkomstpunkten "Long Range WifiPPM/MSP". Lösenordet är "WifiPPM/MSP". Öppna webbplatsen igen 192.168.4.1. Kontrollera igen i cleanflight om det fungerar.
Anslut antennerna till ESP07 -modulerna.
Steg 4: Lite mer information

Det finns två åtkomstpunkter vid normal drift. "WifiPPM/MSP" -åtkomstpunkten är som det tidigare WifiPPM -projektet. Du kan använda den om du bara vill göra en snabb flygning utan att ansluta några ytterligare moduler när du inte behöver anslutning med lång räckvidd. Om du ansluter till "Long Range WifiPPM/MSP" tar fjärrkontrollen kontrollen.
Kanske vill du veta hur lång är "lång räckvidd". Jag vet faktiskt inte riktigt. Det är minst några hundra meter. Men jag kunde inte testa det förrän nu. Det tappar inte anslutningen i min kompletta lägenhet.
Jag lade till MSP -kontroll eftersom jag trodde att jag skulle kunna skapa en bakkanal för telemetradata. Men det fungerade aldrig stabilt. Hur som helst, MSP -protokollet är mer exakt än ppm, eftersom det inte beror på timing så mycket. Kanske gör det problem med långsamma flygkontroller eftersom det är tung trafik på serieporten. Med min Noxe F4 flygkontroll fungerar det utan problem.
Om du har några konfigurationsproblem, titta på det gamla WifiPPM -projektet.
Rekommenderad:
IoT- Ubidots- ESP32+Long-Range-Wireless-Vibration-and-Temperature-Sensor: 7 Steg

IoT- Ubidots- ESP32+Long-Range-Wireless-Vibration-And-Temperature Sensor: Vibration är verkligen en rörelse fram och tillbaka-eller oscillation-av maskiner och komponenter i motoriserade prylar. Vibrationer i industrisystemet kan vara ett symptom eller motiv för ett besvär, eller det kan vara associerat med daglig drift. Till exempel osci
Esp32-Ubidots-Wireless-long-range temperatur och fuktighet: 6 steg

Esp32-Ubidots-Wireless-long-range temperatur-och-luftfuktighet: I denna handledning kommer vi att mäta olika temperatur- och luftfuktighetsdata med hjälp av temp- och fuktighetssensor. Du lär dig också hur du skickar denna data till Ubidots. Så att du kan analysera det var som helst för olika applikationer
Nod-RÖD Med IoT Long Range Vibration och temperatursensor: 34 steg

Node-RED med IoT Long Range Vibration och Temperatursensor: Vi introducerar NCD: s trådlösa fuktighetssensor för trådlösa temperaturer med upp till 28 Miles intervall med en trådlös nätverksarkitektur. Att införliva Honeywell HIH9130 temperaturfuktighetssensor överför mycket exakt temperatur och
IoT-ThingSpeak-ESP32-Long-Range-Wireless-Vibration-And-Temp: 6 steg

IoT-ThingSpeak-ESP32-Long-Range-Wireless-Vibration-And-Temp: I detta projekt kommer vi att mäta vibrationer och temperatur med hjälp av NCD-vibrations- och temperatursensorer, Esp32, ThingSpeak.Vibration är verkligen en rörelse fram och tillbaka-eller oscillation - av maskiner och komponenter i motoriserade prylar. Vibrationer i
Wifi PPM (ingen app behövs): 4 steg (med bilder)
: 4 steg (med bilder)")
Wifi PPM (ingen app behövs): Jag ville styra min diy mikro inomhus quadrocopter med min smarta telefon men jag kunde inte hitta en bra lösning för detta. Jag hade några ESP8266 wifi -moduler som låg runt så jag bestämde mig för att göra min egen. Programmet startar en wifi -åtkomstpunkt med en HTML