
Innehållsförteckning:
- Författare John Day day@howwhatproduce.com.
- Public 2024-01-30 12:45.
- Senast ändrad 2025-01-23 15:11.



Detta är en enkel demonstration av användningen av DWMM0 -mezzaninen för fjärrdataloggning. Klientsidan i det här programmet kör ett python -skript (client.py) som ansvarar för att läsa GNSS/GPS -data och överföra det till serversidan (via TCP/IP protokoll), som kör ett annat skript (server.py) som ansvarar för insamling och lagring av inkommande data.
Referens: projektets webbplats
Steg 1: DWMM0 - MASKINBESKRIVNING

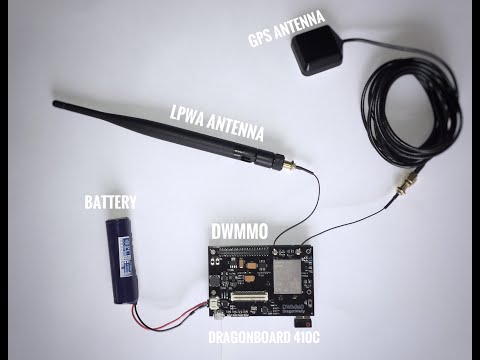
DWMM0 Mezzanine är ett tilläggskort för tillbehörskortet för DragonBoard 410c single board-dator (eller någon annan 96Boards standard SBC). Denna mezzanine består av fem huvudsakliga delsystem:
- Li-Ion batteriladdningsregulator
- USB 2.0 -navkontroll
- DC/DC Boost -omvandlare (från 3.0V till 9.0V)
- LPWA/GNSS -modul (med en Quectel BG96 -enhet)
- DC/DC -omvandlare (från 5V till 3.3V och 4.1V)
Steg 2: DWMMO - GNSS/GPS LOGGER APPLIKATION
De ursprungliga python -skripten för den här applikationen kan laddas ner härifrån: nedladdningsskript Server.py -skriptet måste köras på vilken dator som helst med internetanslutning (SERVER -sida). Skriptmistet client.py körs på en DragonBoard 410c med DWMM0 Mezzanine (KLIENT -sida Varje skript har sin egen "konfigurerbara parametrar" -session, som måste justeras av användaren (t.ex. TCP/IP -adress, portar, nätverks -APN, användarnamn och lösenord).
Steg 3: DWMM0 - GENERERING KML FIL
Filen updated_python_scripts.zip innehåller ett modifierat klientskript (gpslog.py) som implementerar lokal lagring av GPS -data (NMEA -data från Quectel BG96 -modulen):
- gpslog.py: uppdaterat klientskript (lagrar GPS -data i fillogger.txt)
- makekml.py: konverterar logger.txt -filen till en KML -version (logger.kml) som kan öppnas i Google Earth
- logger.txt: sparad GPS -data
- logger.kml: KML -konvertering av sparad GPS -data
Rekommenderad:
Anslutning av ESP 32 med ultraljudssensor: 3 steg

Ansluta ESP 32 med ultraljudssensor: Ultraljudssensorer fungerar genom att avge ljudvågor med en frekvens som är för hög för att människor ska höra. De väntar sedan på att ljudet ska reflekteras tillbaka och beräknar avstånd baserat på den tid som krävs. Detta liknar hur radar mäter den tid det tar
Anslutning av MPU6050 med ESP32: 4 steg

Ansluta MPU6050 med ESP32: I det här projektet kommer jag att koppla in MPU6050 -sensor med ESP32 DEVKIT V1 -kort. MPU6050 är också känd som 6 -axelsensor eller 6 -graders frihet (DOF) -sensor. Både accelerometer- och gyrometersensorer finns i denna enda modul. Accelerometer
Esp8266 Firebase -anslutning: 10 steg

Esp8266 Firebase -anslutning: För att börja med det här projektet behöver du följande komponenter: esp8266 (NodeMcu v3 Lua) google -konto (firebase) Du kan köpa en esp8266 härifrån: amazon.com aliexpress.com
Anslutning av Arduino WiFi till molnet med hjälp av ESP8266: 7 steg

Ansluta Arduino WiFi till molnet med hjälp av ESP8266: I den här självstudien kommer vi att förklara hur du ansluter din Arduino till IoT -molnet via WiFi. för att kommunicera med AskSensors moln. L
Micro: bit MU Vision Sensor - Seriell anslutning och OLED -skärm: 10 steg

Micro: bit MU Vision Sensor - Seriell anslutning och OLED -skärm: Detta är min tredje guide till MU vision sensor. Hittills har vi försökt använda MU för att känna igen kort med siffror och former, men för att utforska vår MU -sensor med mer komplexa projekt skulle vi vilja få en bättre produktion. Vi kan inte få så mycket information