")
Innehållsförteckning:
- Författare John Day day@howwhatproduce.com.
- Public 2024-01-30 12:44.
- Senast ändrad 2025-01-23 15:11.



Hej killar..
Har du någonsin vandrat för att göra ett labyrintkort som kan styras från din Android -smartphone …!
Du är på rätt plats. Jag byggde en för mig själv med Arduino och android.
Oroa dig inte, det är enkelt.. I det här projektet kommer jag att visa dig hur du gör:
1. Labyrintbräda (jag gjorde den av gamla trälådor som låg runt).
2. Android app i app uppfinnare för att styra styrelsen.
3. Skriva programmet i Arduino för att styra styrelsen och
4. Ställa in kretsen….
Du kan senare använda konceptet som lärt dig i andra projekt som du kommer att bygga..
Så utan att slösa mer tid, låt oss börja ….!
Steg 1: Samla komponenterna



För detta projekt kommer du att behöva följande:
1. Två servomotorer (jag använde minimotorer och de fungerade för mig).
2. Arduino Uno. (Jag föreslår att du köper den från snapdeal, det är en klon men är värd varenda krona jag spenderade)
3. En Bluetooth -modul.
4. En brödbräda.
5. Några bygelkablar
6. Tunna trä- eller hårda brädor
7. spikar, några nyckelstänger från gamla tangentbord
8. Thermocol (polystyren)
Steg 2: Gör labyrintbrädan



Detta är den mekaniska delen av projektet..
Ta först en lång rektangelbit av träplanka eller kartong för basen. den måste vara större än själva lutningsbrädan..
Skär två små lika stora kubiska trä..
och lägg till en spik på varje, så att de är aline på samma höjd från basen. Skär också lite extra trä som du kan lägga till som stöd för pelarna..
nu till toppbrädan..
gör en ram mindre än basen, detta kommer att vara vår x -axel, vid utsidan av ramens mindre kanter gör du små hål exakt i mitten av kanterna. skär stavarna i hälften och fäst dem vid de stora kanterna på ramen inåt. skär dem i hälften innan du gör det.
detta håller den övre brädan vid ramen och hjälper till med rotation.
lägg nu till pelarna i de yttre hålen så att ramen står på basen.
fäst pelarna på basen och fäst även stöden på dem.
nu för att lägga till servomotorerna.
en kommer att fästas på basen och kommer att fästas på ramen med en liten stång för att rotera ramen
en annan kommer att fästas på ramen och kommer att fästas på det övre brädet med en liten stång för att rotera det övre brädet.
servon ska monteras vinkelrätt mot varandra som visas på bilderna.
nu är styrelsen klar.
Jag gjorde labyrinten med hjälp av termokaka och ett kartong.
Steg 3: Konfigurera kretsen

Ställ in kretsen enligt bilden …
Kom ihåg att för servon använder jag den röda tråden är positiv, brun är negativ och orange är signal.
Bluetooth -modul
Rx går till stift 1
Tx går till pin 0
Signaltråd för bas servo går till stift 5
Signaltråd på ramservo går till stift 6
Kom ihåg att lägga till ytterligare strömförsörjning för servo- och bluetooth -modulen. Andra kloka moduler kommer inte att få tillräckligt med ström och kommer att fortsätta att koppla bort, visar fel 516. Jag hade mycket problem med att felsöka det och slutligen ta reda på problemet och lösningen.
Steg 4: Skapa appen


Okej först och främst måste du logga in i mit app inventor för att göra några appar..
gå till
och klicka på Skapa app! som i det övre högra hörnet, registrera dig och du är redo att gå ….
Allt annat jag har visat i videon.. ta en titt.
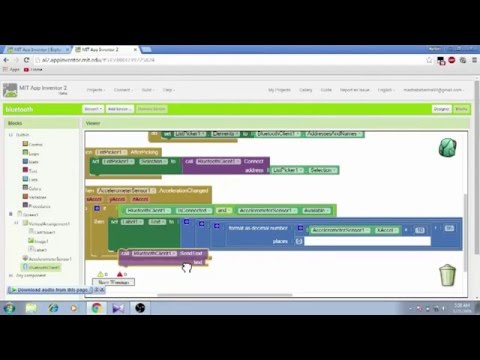
här det grundläggande:
när skärmen initieras i appen (vilket i detta fall är skärm1), -accelerometernsensorn är aktiverad och känsligheten är inställd på max dvs 3.
nu när vi trycker på listväljaren
-en lista dyker upp med en lista över de parade enheterna.
(du måste para ihop modulen innan du öppnar appen, som vanligt är parkoden 1234)
Nu innan du väljer listväljaren, -sätt listan med de ihopparade enheterna och deras adresser
När du har valt enheten
-Bluetooth -adaptern ansluter till den valda enheten
Nu är modulen ansluten
Nu när acclerometerSensor data ändras
-Lägg till data i etiketttexten och skicka den med Bluetooth -skicka.
Nu är den knepiga delen att skicka de två data i taget
# acklerometerdata sträcker sig från 0 till 9,5 när det lutas åt vänster och 0 till -9,5 när det lutar till höger, samma sak när telefonen lutas under och uppåt avdelningar..
så vi har x- och y -axelns lutningsdata som vi måste skicka …
låt data för x -axeln vara X och y -axeln vara Y
så det jag gjorde är detta:
Text = "(X*10 (ta bort decimalerna efter det) +95)*1000 (multiplicera med 1000)+Y*10 (ta bort decimalerna) +95"
så nu sträcker sig data från 0 till 190 för varje axel och läggs till för att göra 190180 där de tre första siffrorna är x -axeln och de tre sista är y -axelkoordinaterna …
som kommer att skickas till bluetooth -modulen och bryts ner till den faktiska datan och kartan med servos rotationsvinklar i arduino -kod …
Steg 5: Skriva Arduino -koden


När appen är klar kan vi börja med koden, jag har laddat upp koden, ladda ner den, kompilera och skicka den till arduino men vänta innan du skickar koden, koppla loss rx- och tx -stiften på bluettoh -modulen från arduino -kortet.. och skicka koden efter detta kan du fästa stiften igen..
koden som tas emot från bluetooth är en sträng som har våra axeldata.
nu Serial.parseInt (); används för att läsa strängen och konvertera strängen till int i en variabel pos.
nu har pos värde = 190180 (säg) vårt mål är nu att dekryptera data, dvs ta bort x -axeln och y -koordinaterna
för x -axeln. dividera värdet med 1000, detta ger 190.i.e värde/1000 = 190
och för y -axeln modulärt dela värdet med 1000, vilket ger oss 180 dvs värde%1000 = 180
beräkna nu max och min position för servon som du vill ha för att luta brädet, … i mitt fall är det 180 och 75 och ….
nu fick vi x- och y -axeln samordnad, nu måste vi bara kartlägga koordinaterna med min och max rotationsvinklar som vi vill ha för våra servon …
se koden för detaljer.
Och vi är klara … ladda upp koden, öppna appen connect and play….
Vet du att google har gjort en för sig själv och är en mycket stor labyrint du någonsin har sett … vilket också är min motivation för att bygga en åt mig själv.
Så till nästa gång, ha kul..
Rekommenderad:
Programmera din Arduino med en Android -enhet via Bluetooth: 6 steg (med bilder)
")
Programmera din Arduino med en Android -enhet via Bluetooth: Hej världen, i den här instruktionsboken vill jag visa dig hur du programmerar din Arduino Uno med din Android -enhet via Bluetooth. Det är väldigt enkelt och så billigt. Det tillåter oss också att programmera vår Arduino var vi än vill via trådlös bluetooth … Så
Anpassningsbar Laser Maze med Arduino och Android App: 13 steg (med bilder)
")
Anpassningsbar Laser Maze med Arduino och Android App: Se mycket labyrint från barnböcker till automatisk labyrintlösningsrobot. Här försöker jag något annorlunda där jag löser en labyrint med laserreflektion. När jag tror att det är väldigt enkelt i början, men det gör det billigt kostar det mer tid för noggrannhet. Om någon vill
Realtid MPU-6050/A0 dataloggning med Arduino och Android: 7 steg (med bilder)
")
Realtid MPU-6050/A0 dataloggning med Arduino och Android: Jag har varit intresserad av att använda Arduino för maskininlärning. Som ett första steg vill jag bygga en realtid (eller ganska nära det) datavisning och logger med en Android -enhet. Jag vill fånga accelerometerdata från MPU-6050 så jag utformar
Enklaste hemautomation med Bluetooth, Android -smartphone och Arduino .: 8 steg (med bilder)
")
Enklaste hemautomation med Bluetooth, Android -smartphone och Arduino .: Hej alla, det här projektet handlar om att bygga den mest förenklade hemautomatiseringsenheten med en arduino och en bluetooth -modul. Den här är väldigt enkel att bygga och den kan byggas på några timmar. I min version som jag förklarar här kan jag
Android (remotexy) UI för att styra servomotor med Arduino och Bluetooth: 7 steg (med bilder)
 UI för att styra servomotor med Arduino och Bluetooth: 7 steg (med bilder)")
Android (remotexy) UI för att styra servomotor med Arduino och Bluetooth: I den här instruktionsboken ger jag dig ett snabbt steg för att göra Android -användargränssnitt med Remotexy Interface Maker för att styra servomotor ansluten till Arduino Mega via Bluetooth. Denna video visar hur användargränssnittet kommer att styra servomotorns hastighet och position