")
Innehållsförteckning:
- Författare John Day day@howwhatproduce.com.
- Public 2024-01-30 12:38.
- Senast ändrad 2025-01-23 15:10.




Ottos verkliga open source -natur tillåter öppen STEAM -utbildning, vi samlar in feedback från olika workshops och skolor runt om i världen som redan använder Otto DIY i sitt klassrum och beroende på öppenheten för dessa utbildningsplatser organiserar vi lektionsmaterialet och delar också.
CC-BY-SA Creative commons-licens det betyder att du kan kopiera gratis men du måste ge originalet krediter genom att lägga vår webbplats (https://www.ottodiy.com/)
Otto DIY + är den förbättrade och avancerade versionen av originalet #OttoDIY, tanken är att ha samma basfunktioner DIY -robot + Bluetooth -styrning och programmering + metallväxelmotor servomotorer + laddningsbara + ändringslägen med beröringssensor + ljudsensor + ljusrörelser + andra utgångar +…?
Den spännande delen är att vi gör öppen utveckling med tillverkare och hackare runt om i världen så att vi är öppna för idéer, inte bara från experter du kan gå med oss, feedback, social delning, testning eller andra bidrag som du kan tänka dig.
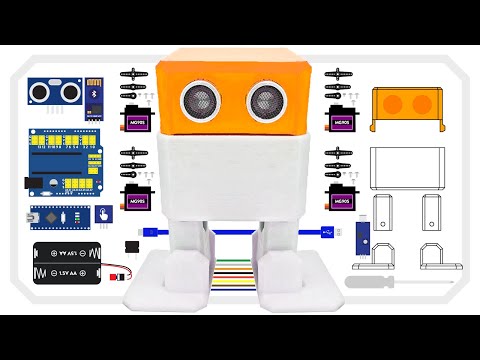
Tillbehör
1 × Arduino Nano
1 × HC-06 eller HC-05 Bluetooth-modul
1 × Arduino Nano Shield I/O; du kan använda en mini -brödbräda men mycket mer kabelarbete
1 × USB-A till Mini-USB-kabel
4 × Micro servo MG90s (metall)
1 × summer
10 × Kvinnliga/Kvinnliga Jumper Wires
1 × beröringssensor
1 × ljudsensor
1 × 8x8mm Micro Switch Självlås På/Av
1 × 3,7 V LiPo -batteri med förstärkare till 5V (tillval) 1 × Phillips -skruvmejsel 1 x 3D -skrivare (eller använd en tjänst eller en vän;))
Steg 1: 3D -skrivarinställningar

Det är viktigt att läsa första Otto DIY tidigare instruerbara för att bekanta sig med grunderna för att bygga en tvåbent robot Få alla 3D-utskrift STL-delar, koder och bibliotek för Bluetooth genom att gå hit https://wikifactory.com/+OttoDIY/otto-diy- plus på fliken filer
- Rekommendera att använda en FDM 3D -skrivare med PLA -material.
- Inget behov av stöd eller flottar alls.
- Upplösning: 0,15 mm
- Fyllningstäthet 20%
Behöver justera storlek några ändringar använda källfilen som gjorts i Autodesk Fusion 360
Eller Tinkercad här
Steg 2: Bygg din egen Otto DIY+



i följande video och bilder kan du ha en referens till hur man bygger Otto DIY+, på grund av några nya versioner av robotdesignen.
Steg 3: Kod din egen Otto





Så till denna punkt bör du ha en Otto 3D -utskriven, monterad, nu lite programmering för att ha bibliotek och Arduino installerat i din dator.
Det enklaste att koda din egen Otto är genom att använda vår Blockly -programvara, mer avancerad kodare kan prova Arduino IDE direkt.
Steg 4: Huvudkod för Bluetooth APP




Otto måste vara redo att ta emot kommando via Bluetooth och för det måste han lägga huvudkoden i hjärnan
- Kopiera Otto -bibliotek till mappen Arduino IDE
- Ladda upp APP.ino -skiss till Otto
- Ladda ner och installera appen i din smartphone. Google Play Butik (https://play.google.com/store/apps/details?id=com.ottodiy)
- Nu kan du ansluta modulen och Aktivera Bluetooth i telefonen.
- Hitta Otto och koppla ihop Bluetooth -adressen /namnet
- Nu kan du använda appen för att styra Otto!
- Spela med de nya funktionerna och om inte kan du behöva omkonfigurera din BT men oroa dig inte är också enkelt;)
Steg 5: Kopiera, expandera, anpassa, ändra, remixa och dela




Kolla in detta blogginlägg för att hitta idéer om hur du anpassar din egen robot
Gå med i Otto Builder -gemenskapen! Följ oss, gilla oss och dela din kreativitet, du kan presenteras här genom att dela din robot i alla sociala medier
Facebook och Instagram
använd hashtaggen #ottodiy i ditt inlägg och tagga eller nämn @OttoDIY
Var en del av denna vänliga gemenskap av robotbyggare, lärare och tillverkare! genom att gå med oss här Välkommen till vår Otto Builder -community!
Steg 6: Bluetooth (BT) -inställning (endast om parning inte lyckades):
Den här inställningen behövs ENDAST för moduler som inte levereras med standardöverföringshastigheten 9600, hur vet man det? försök bara först med koden och APP, om telefonen inte parar ihop med Otto eller svarar på kommandon betyder det förmodligen att din modul har en annan baudhastighet så måste konfigureras
BT-koden har 115200 baud-hastighet så BT-modulen måste matcha den hastigheten för att kunna kommunicera med Arduino Nano via seriellt gränssnitt (UART).
För HC-05: 38400 eller 115200
1. Ladda upp skissen HC05_BT_config.ino till din Nano först och koppla sedan bort Nano från USB.
2. Anslut nu BT till Arduino Nano enligt diagrammet men anslut inte VCC.
TX - RX
RX - TX
VCC - 5V
GND - GND
3. Anslut USB till Nano och anslut sedan VCC så att BT går in i AT -läge. Lysdioden på BT bör börja blinka långsammare, ungefär varannan sekund. (Om detta inte fungerar, försök att hålla knappen på BT -modulen medan du ansluter VCC).
Öppna seriell bildskärm i IDE, ställ in överföringshastighet till 9600 och radändning till både NL & CR.
Skriv AT och tryck sedan på enter; (om allt är rätt ska BT svara med OK och sedan ange följande kommandon:
AT+NAME = Zowi "ställer in namnet"
AT+PSWD = 1234 "parningslösenord"
AT+UART = 115200, 1, 0 "baud rate"
AT+POLAR = 1, 0 "gör att STATE -stift kan användas som återställning för programmering av arduino över BT"
Gå nu till APP -steget
Om det finns några problem, kontrollera den här instruktionen om hur du ändrar standardinställningarna för HC-05 Bluetooth-modulen med hjälp av AT-kommandon
www.instructables.com/id/Modify-The-HC-05-…
För HC-06: 9600 eller 115200
För HC-06 BT-modulen är saker och ting lite enklare eftersom modulen alltid är i AT-kommandoläge när den inte är ansluten till någonting. Men baksidan är att HC-06-modulen inte kan användas för att ladda upp skisser till Arduino eftersom den inte har återställts. För att konfigurera modulen
1. ladda upp denna skiss HC06_BT_config.ino till din Nano
1. koppla ur USB
2. anslut BT -modulen till Arduino Nano så här:
TX - RX
RX - TX
VCC - 5V
GND - GND
3. Slå på din Nano och efter cirka 10-15 sekunder ska allt vara klart och din BT bör konfigureras (LED13 ska börja blinka).
Om det finns några problem, kontrollera denna instruerbara
OM NÅGON FRÅGA får jag inga aviseringar från instruktörerna nya kommentarer så om något, vänligen posta i vår community
Rekommenderad:
Guiden jag önskade att jag hade om att bygga en Arduino Drone: 9 steg

Guiden jag önskade att jag hade om att bygga en Arduino Drone: Detta är ett dokument som är en slags "How to guide" -streckad dokumentation som går igenom processen. Det tog mig att förstå begreppen för att uppnå mitt mål att bygga en enkel quadcopter som jag kunde kontrollera från min mobiltelefon. För att göra det här projektet ville jag
OAREE - 3D -tryckt - hinder för att undvika robot för ingenjörsutbildning (OAREE) med Arduino: 5 steg (med bilder)
 med Arduino: 5 steg (med bilder)")
OAREE - 3D Printed - Obstacle Avoiding Robot for Engineering Education (OAREE) With Arduino: OAREE (Obstacle Avoiding Robot for Engineering Education) Design: Målet med denna instruerbara var att designa en OAR (Obstacle Avoiding Robot) robot som var enkel/kompakt, 3D -utskrivbar, enkel att montera, använder kontinuerliga rotationsservos för rörliga
Lätt RFID MFRC522 -gränssnitt med Arduino Nano: 4 steg (med bilder)
")
Lätt RFID MFRC522 -gränssnitt med Arduino Nano: Åtkomstkontroll är mekanismen inom områdena fysisk säkerhet och informationssäkerhet, för att begränsa anonym åtkomst/inträde till resurser i en organisation eller ett geografiskt område. Handlingen att komma åt kan innebära att man konsumerar, går in eller använder.
Lätt Arduino GSM -mobiltelefon.: 7 steg (med bilder)
")
Lätt Arduino GSM -mobiltelefon .: Hej vänner, I denna instruerbara presenterar jag min Lätta Arduino GSM -mobiltelefon. Den lätta mobilen har följande nationella/internationella funktioner: Ring. Ta emot samtal. Skicka sms. Ta emot SMS. I detta projekt,
Android (remotexy) UI för att styra servomotor med Arduino och Bluetooth: 7 steg (med bilder)
 UI för att styra servomotor med Arduino och Bluetooth: 7 steg (med bilder)")
Android (remotexy) UI för att styra servomotor med Arduino och Bluetooth: I den här instruktionsboken ger jag dig ett snabbt steg för att göra Android -användargränssnitt med Remotexy Interface Maker för att styra servomotor ansluten till Arduino Mega via Bluetooth. Denna video visar hur användargränssnittet kommer att styra servomotorns hastighet och position